






BOSM -Mesin Pengeboran dan Pengeboran Kontra Horisontal
1. Penggunaan peralatan:
Mesin bor dan bor counter horizontal BOSM merupakan Mesin khusus bagi perusahaan Anda untuk mengolah tutup tower crane. Mesin ini dilengkapi dengan 2 set pengeboran horizontal dan power head pengeboran, yang dapat mewujudkan pengeboran, penggilingan, dan pengeboran benda kerja dalam rentang langkah efektif. Pemotongan dan pemrosesan lainnya, kecepatan pemosisian peralatan cepat, akurasi pemrosesan tinggi, dan efisiensi pemrosesan tinggi.
2. Karakteristik struktur peralatan:
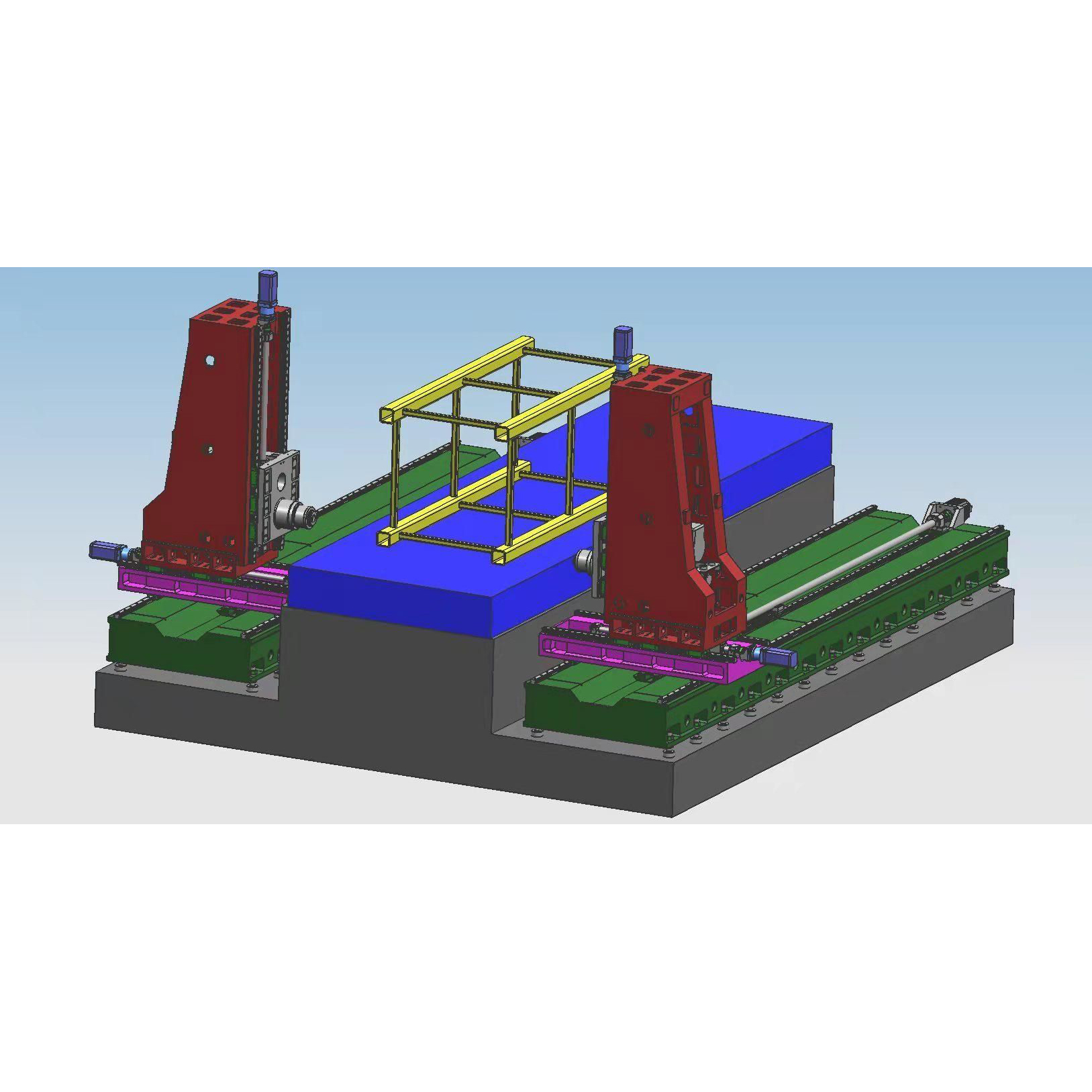
2. 1. Komponen utama dariMesin
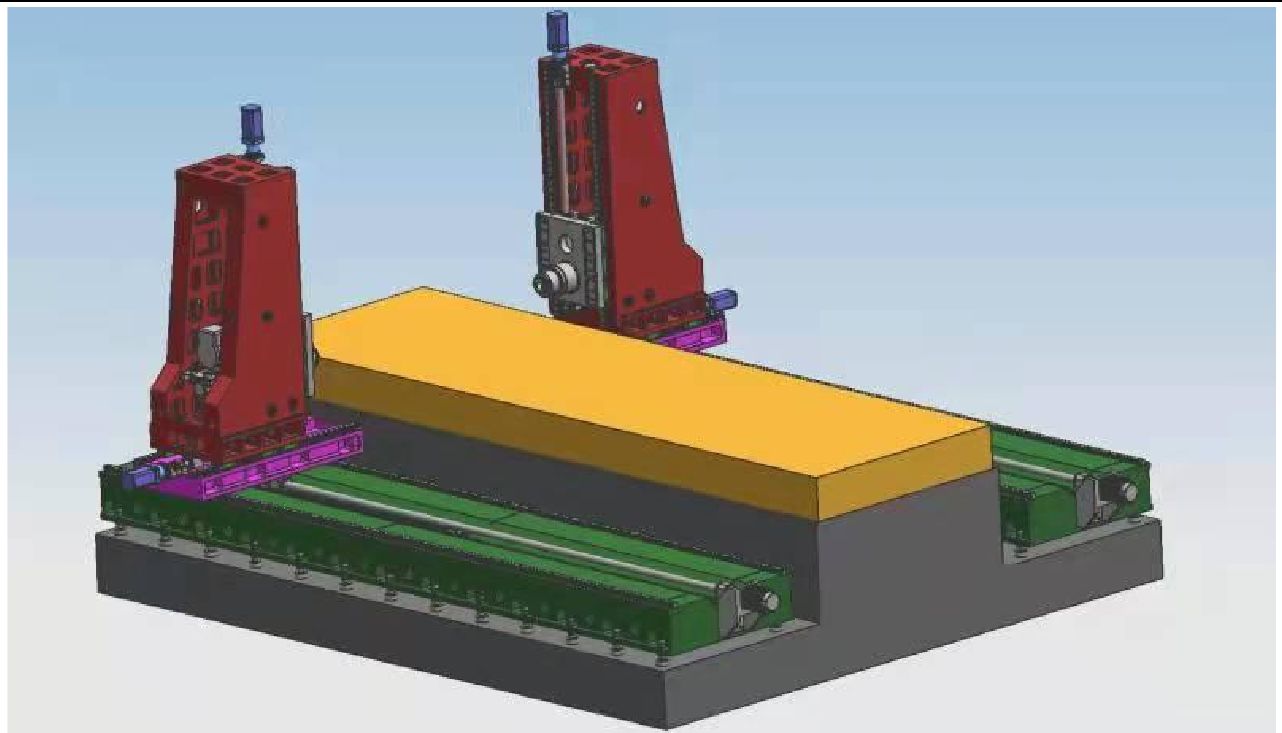
Komponen utama Mesin: tempat tidur, meja kerja, kolom kiri dan kanan, pelana, domba jantan, dll., sebagian besar terbuat dari cetakan pasir resin, pengecoran besi abu-abu 250 berkualitas tinggi, dianil dalam lubang pasir panas→penuaan getaran→panas anil tungku→penuaan getaran→ Pemesinan kasar→penuaan getaran→anil tungku→penuaan getaran→penyelesaian untuk sepenuhnya menghilangkan tekanan negatif pada suku cadang dan menjaga kinerja suku cadang tetap stabil. Meja kerja peralatan sudah diperbaiki, dan kepala daya di kedua sisi dapat bergerak ke arah depan dan belakang pangkalan; Mesin mempunyai fungsi seperti pengeboran, pengeboran, countersinking, penyadapan, dll. Metode pendinginan alat adalah pendinginan internal ditambah pendinginan eksternal. Mesin ini berisi 5 sumbu umpan, 2 kepala daya pemotongan, yang dapat disinkronkan dengan 5 sumbu secara bersamaan, atau dapat bertindak tunggal. Arah aksial Mesin dan power head ditunjukkan pada gambar di bawah.
2. 2 Struktur utama bagian umpan transmisi aksial
2.2.1 Sumbu X: Kepala daya melakukan gerakan bolak-balik secara lateral di sepanjang rel pemandu alas.
Penggerak sumbu X1: Motor servo AC ditambah peredam planet presisi tinggi digunakan untuk menggerakkan kepala daya melalui penggerak sekrup bola untuk mewujudkan gerakan linier sumbu X.
Transmisi sumbu X2: Motor servo AC ditambah peredam planet presisi tinggi digunakan untuk menggerakkan kepala daya melalui transmisi sekrup bola untuk mewujudkan gerakan linier sumbu X.
Bentuk rel pemandu: Dua rel pemandu linier presisi berkekuatan tinggi dipasang di dasar yang melebar.
2.2 Sumbu Y1: Kepala daya melakukan gerakan bolak-balik ke atas dan ke bawah pada kolom.
Penggerak sumbu Y1: Mengadopsi motor servo AC untuk menggerakkan sekrup bola untuk mewujudkan gerakan linier sumbu Y1. Bentuk rel panduan: 4 buah rel panduan linier tipe 45.
2.2.3 Sumbu Y2: Power head bergerak bolak-balik ke atas dan ke bawah pada kolom.
Transmisi sumbu Y2: Motor servo AC digunakan untuk menggerakkan sekrup bola untuk mewujudkan gerakan linier sumbu Y1.
Bentuk rel pemandu: 4 buah rel pemandu linier tipe 45.
2.2.4 Sumbu Z1: Power head bergerak bolak-balik pada sadel.
Transmisi sumbu Z1: Motor servo AC dan peredam planet presisi tinggi digunakan untuk menggerakkan gerakan melalui sekrup bola untuk mewujudkan gerakan linier sumbu Z1.
2.2.5 Sumbu Z2: Power head bergerak bolak-balik pada sadel.
Transmisi sumbu Z2: Motor servo AC dan peredam planet presisi tinggi digunakan untuk menggerakkan gerakan melalui sekrup bola untuk mewujudkan gerakan linier sumbu Z2.
2.3. Pelepasan dan pendinginan chip
Ada konveyor chip rantai datar yang dipasang di kedua sisi di bawah meja kerja, dan chip besi dapat dibuang ke konveyor chip di bagian akhir untuk mewujudkan produksi yang beradab. Terdapat pompa pendingin di tangki pendingin konveyor chip, yang dapat digunakan untuk pendinginan internal + pendinginan eksternal alat untuk memastikan kinerja dan masa pakai alat, dan cairan pendingin dapat didaur ulang.
3. Sistem kontrol numerik digital penuh:
3.1. Dengan fungsi pemecahan chip, waktu pemecahan chip dan siklus pemecahan chip dapat diatur pada antarmuka manusia-mesin.
3.2. Dengan fungsi pengangkatan pahat, jarak pengangkatan pahat dapat diatur pada antarmuka manusia-mesin. Ketika jarak tercapai, pahat akan segera terangkat, kemudian serpihan akan dibuang, kemudian maju cepat ke permukaan pengeboran dan secara otomatis diubah menjadi kerja.
3.2. Kotak kontrol operasi terpusat dan unit genggam mengadopsi sistem kontrol numerik dan dilengkapi dengan antarmuka USB dan layar kristal cair LCD. Untuk memfasilitasi pemrograman, penyimpanan, tampilan dan komunikasi, antarmuka operasi memiliki fungsi seperti dialog manusia-mesin, kompensasi kesalahan, dan alarm otomatis.
3.2.. Peralatan memiliki fungsi melihat pratinjau dan memeriksa ulang posisi lubang sebelum diproses, dan pengoperasiannya sangat nyaman.
4. Pelumasan otomatis
Pasangan rel pemandu linier presisi alat berat, pasangan sekrup bola presisi, dan pasangan gerak presisi tinggi lainnya dilengkapi dengan sistem pelumasan otomatis. Pompa pelumas otomatis mengeluarkan oli bertekanan, dan ruang oli pelumas kuantitatif memasuki oli. Ketika ruang oli terisi oli dan tekanan sistem naik menjadi 1,4~1,75Mpa, sakelar tekanan dalam sistem ditutup, pompa berhenti, dan katup pembongkaran dibongkar pada saat yang bersamaan. Ketika tekanan oli di jalan turun di bawah 0,2Mpa, pelumas kuantitatif mulai mengisi titik pelumasan dan menyelesaikan satu pengisian oli. Karena jumlah oli yang disuplai secara tepat oleh kapal tangki kuantitatif dan kemampuan untuk mendeteksi tekanan sistem, pasokan oli dapat diandalkan dan memastikan adanya lapisan oli pada permukaan setiap pasangan kinematik, yang mengurangi gesekan dan keausan serta mencegah kerusakan. ke struktur internal yang disebabkan oleh panas berlebih. , untuk memastikan keakuratan dan umur Mesin.
5. Mesingunakan lingkungan:
Catu daya: AC380V tiga fase±10%, 50Hz±1 Suhu sekitar: -10°~ 45°
6. Kriteria penerimaan:
JB/T10051-1999 "Spesifikasi Teknis Umum Sistem Hidraulik Mesin Pemotong Logam"
7. Parameter teknis:
| Model | 2050-5Z | |
| Ukuran benda kerja pemrosesan maksimum | Panjang × lebar × tinggi (mm) | 5000×2000×1500 |
| ukuran meja kerja | Panjang X Lebar (mm) | 5000*2000 |
| Perjalanan arah dasar power head | Bergerak maju mundur (mm) | 5000 |
| Kekuatan mengarah ke atas dan ke bawah | Pukulan ram ke atas dan ke bawah (mm) | 1500 |
|
Kepala daya pengeboran tipe ram horizontal Kepala daya 1 2 | Jumlah (2 buah) | 2 |
| Spindel lancip | BT50 | |
| Diameter pengeboran (mm) | Φ2-Φ60 | |
| Diameter penyadapan (mm) | M3-M30 | |
| Kecepatan spindel (r/mnt) | 30~3000 | |
| Daya motor spindel servo (kw) | 22*2 | |
| Perjalanan kiri dan kanan (mm) | 600 | |
| Akurasi Pemosisian Dua Arah | 300mm*300mm | ±0,025 |
| Akurasi posisi pengulangan dua arah | 300mm*300mm | ±0,02 |





